Research
Research projects
The lab thoroughly investigates all aspects of mechanical systems, and specifically, how to engineer a specific motion. This work can entail kinematics, kinetics, mechanism design, mechanism analysis, dynamic modeling and controls.
We have recently been working on several projects as listed below.
Research interests
- Dynamic modeling and controls
- Design of novel robotics and prostheses
- Variation in dynamic systems
- Industrial automation and fixturing
Current Research
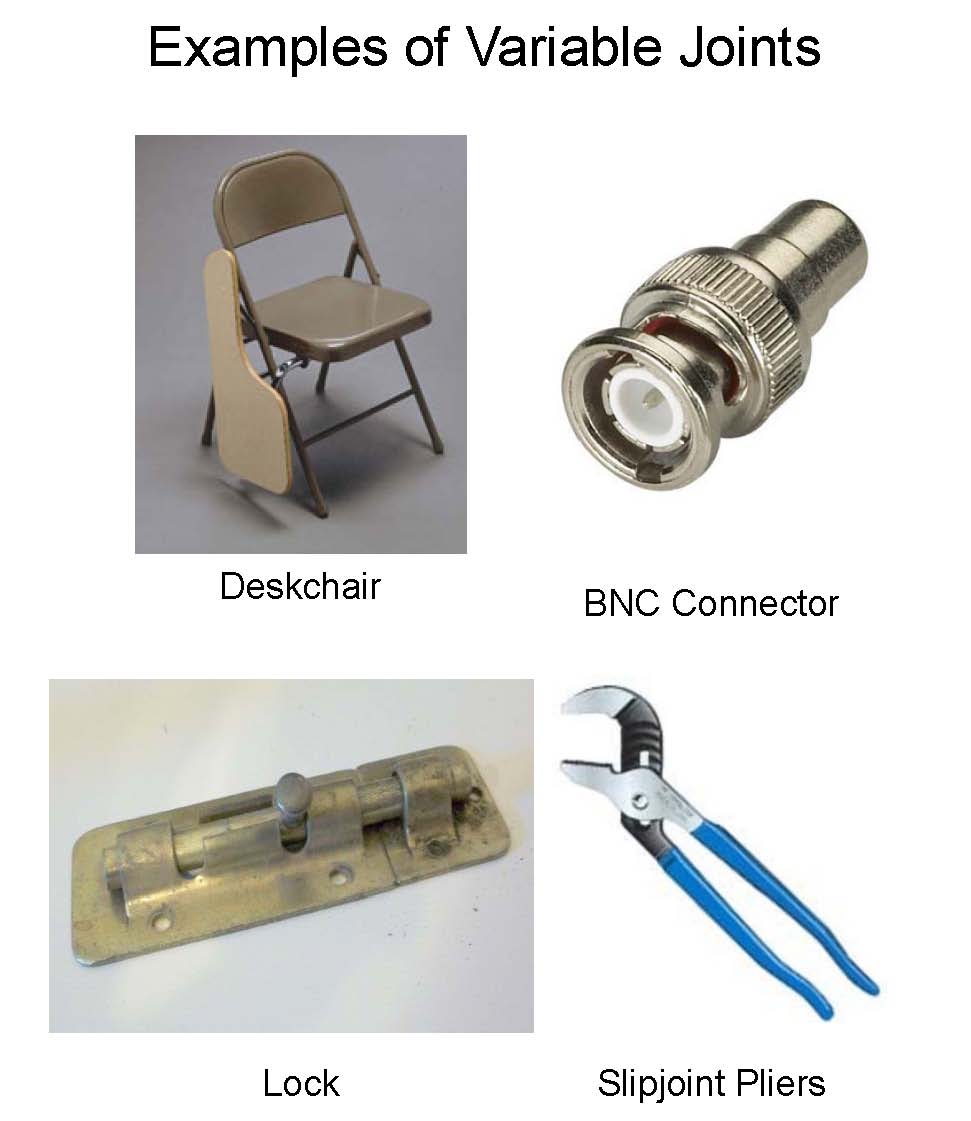
Design and Analysis of Variable Joints
Collaborators: Slaboch (MTSU)
Graduate Students: Slaboch (MU PhD), Korves (MU MSME), Malak (MU MSME), Buchta (MU MSME), Callahan (MU MSME)
Undergraduate Students: Andrews
Engineers typically design mechanisms (also known as actuated linkages) to have the proper kinematic function and then add a multitude of actuators and control algorithms to achieve the proper dynamic function. While this building block approach is robust, it is not applicable to many engineering situations which require small and simple solutions. By adding a multitude of actuators the size, weight and complexity of the mechanism increases dramatically. A new class of mechanisms denoted as kinematic reconfigurable mechanisms, or KRMs, have recently been pursued as an alternative to this traditional approach. KRMs are open or closed loop mechanisms that contain variable joints, i.e., joints which change type and/or orientation during their operation. These mechanisms can either change DOF or resulting kinematic function based upon external stimuli or the dynamics of the mechanism. There is currently limited mathematical framework for the analysis and synthesis of these mechanisms. Even further, there are no guidelines for the design and fabrication of the variable kinematic joints needed for these mechanisms. This work expands the work of Reuleaux to analyze and design variable joints.
Design of Below-Knee (Trans-tibial)
Prosthetic Devices
Collaborators: Schimmels (MU), Silver-Thorn (MU), Beardsley (MU)
Graduate Students: Mattos (USC MSME), Bergelin (MU MSME), Sun (MU MSME), Klein (MU MSME)
Undergraduate Students: Wells, Hodgins, Kane, Plata
Funding: NIH NIBIB R21, DOE NIDRR
In 2001-2002, diabetic complications alone caused 82,000 lower limb amputations while other medical complications resulted in additional 54,000. Considering causes of traumatic amputation such as warfare, vehicle and industrial accidents, and the estimated 45 to 50 million emplaced landmines in nearly 60 countries, the future need for prosthetic devices is certain. However, these devices currently do not allow for true normal human gait. While there has been great strides in the design of passive devices, the human ankle provides a power input. With the current advances in computer control and power sources, a hybrid approach (passive and active elements) can provide the necessary power input into the system and thus result in a more natural gait for amputees. This research has investigated using four bar mechanisms to provide the nonlinear stiffness and power into the system. The research has also focused on the dynamic modeling of gait to investigate the control issues with the design.

Dynamic Modeling of Human Gait Applied to Lower Limb Prostheses
Collaborators: Beardsley (MU), Silver-Thorn (MU)
Graduate Students: Bonivel (USC MSME), Sun (MU PhD), Wu (MU MSME), Thayer (MU MSME)
Funding: Marquette University Committee on Research
Being able to virtually test any product before building it is very desirable in any engineering design problem. However, any virtual test needs an accurate model to determine how the system will react to different parameters and input. Since modeling the dynamics of the entire human body during walking is a very difficult task, the methodologies to design prostheses and orthoses (P&O) are typically indirect in that mechanical properties (spring rate, damping coefficient, mass, etc.) are correlated to some experimental data to determine if the P&O will function properly. The design process then consists of changing the mechanical properties and iterating. This design process, while robust, requires large clinical studies which in turn require much time and money. Additionally, it favors an evolutionary design process instead of a revolutionary one due to the risks involved. Current advances in computing power have opened the door to dynamically model human gait. Programs like SIMM interfaced with powerful industrial MSC ADAMS software have shown that the modeling of human gait is possible. However, the current paradigm for modeling human gait continues to develop more complex models and apply larger computing power in hopes of simulating human gait. This approach is inherently flawed as it utilizes an optimization process that requires knowledge of the resulting gait to work. When designing novel P&O, the resulting gait is unknown and, thus, there is a need for a different approach. In this research, we will develop a methodology that mimics the natural control system of the human central nervous system to be able to predict both normal and abnormal human gait without knowing the output gait a priori.
Tolerance Allocation Applied to Dynamic Systems
Graduate Students: Rogers (MU MSME), Jennings (MU MSME), Ryan (MU PhD)
Numerous applications (e.g., CT scanners, mining machinery) contain a multitude of components that are assembled together to function properly. Dynamic modeling and simulation of these machines is critical for function, but is limited by the variation in the component parts. Proper understanding and allocation of the tolerances limits the amount of manual post manufacturing tuning needed to ensure proper function. This work looks to simulate mechanical systems with variation and identify how tolerances should be assigned by developing methodologies for incorporating variation into the governing equations of motion.
Past Research
Reconfigurable Mechanisms as End Effectors for Fixtureless Assembly
Graduate Students: Ziesmer (MU MSME), Slaboch (MU MSME)
Undergraduate Students: Shaw-Alley, Soles, Flynn, Prisco
Video: UPAS System (Large File:
63M)
Assembly robotics in current industrial settings require the use of dedicated jigs and fixtures to locate the part in an exact position. With the ever increasing need for more agile manufacturing that can adapt to product changes quickly, the processes need to adapt as well. While there has been considerable effort in designing end effectors that can grasp a wide variety of objects (e.g. the Barrett Hand), these have tended to be very complex and are not easily adaptable to the industrial setting. Therefore, most industrial end effectors utilize simple 1DOF devices like parallel jaw grippers with dedicated fixtures that need to be redesigned for each part change. This research bridges the gap between these two end effectors by applying graph theory, screw theory, and classical kinematics and dynamics to the design of end effectors. The structured industrial environment allows for the use of simplifying assumptions in the analysis. These improved end effectors can be combined with the advances in computer vision for truly fixtureless assembly.
Design of Manipulators for Human Robot Interaction
Collaborators: Beardsley (MU)
Graduate Students: Boyarsky (MU MSME)
As robotic applications become increasingly prevalent in environments shared with humans, the need for robots to respond like humans also increases. Current robots are often designed to perform well on an assembly line and interactions with humans are rarely considered. This research analyzes how human motion and response differs from robotic motion and response. Once the major differences between humans and robots, in this sense, are identified, a new type of robot will be engineered to excel at human-robot interaction (HRI).
Dynamic Modeling of Automatic Circuit Reclosers
Graduate Students: Korves (MU MSME)
The design of load break interrupters requires an understanding of the design parameters that effect successful operation. A careful system approach to the modeling of the interrupter and how these parameters affect performance within the constraints is being researched.
Modeling of XY Plotter Cutters
Graduate Students: Prisco (MU MSME)
The process of cutting shapes out of a web requires XY motion of a cutter relative to the web. This motion can be realized by purely moving the cutter and keeping the web fixed or moving the web in the X (or Y) and the cutter in the Y (or X). The most effective manner to do this is unknown. Thus, the design of cutters typically follow historical precedents. By modeling the different types of XY cutting motions, a better understanding of the trade-offs in the design can be understood. This work dynamic models both the kinematic, kinetic, and controls of current and proposed cutters to realize better cutting machines.
Polynomial Chaos Theory Applied to Mechanical Systems
Collaborators: Monti (USC EE), Ponci (USC EE)
Understanding how manufacturing variation affects the fit and function of mechanical parts is a major thrust in industrial product design and manufacturing. Statistical design of experiments and the concepts of six sigma have shown themselves to be invaluable tools to optimize industrial products. However, these concepts require physical experiments to determine the cause and effect relationship. Significant competitive advantage can be gained by predicting the dynamic response of mechanical systems directly from the governing differential equations. This understanding can be garnered by using polynomial chaos theory (PCT). By approximating the process variables by orthogonal polynomials and using a Galerkin projection, the stochastic differential equations can be solved in closed form to approximate the output variation. This method offers a more efficient procedure than traditional Monte Carlo analyses to understand and limit variation. (see Voglewede and Monti for more information.)
Continuous Renewal of Undergraduate Education Via an Interdisciplinary, Inquiry Based Laboratory
Collaborators: Jabbari (USC ChE), Lyons (USC
ME), Golonka (USC - Lancaster), Lowe (Benedict)
Graduate Students: Frassica (USC MSME)
Undergraduate Students: Redick
An undergraduate laboratory is developed to introduce students in engineering and biology to the modern research area of tissue engineering. This proposal is a collaborative effort between the University of South Carolina (USC) Columbia, USC Lancaster, and Benedict College. In this laboratory, senior level students at USC Columbia will design, develop, implement, and optimize bioreactors through an inquiry-based approach; these students will formulate novel research hypotheses, and will be armed with the experimental tools to test their hypotheses. These same systems will then be used to renew laboratory experiments in lower level courses at USC Columbia in mechanical engineering, biomedical engineering, and biology, and at Benedict College in cell biology. Additionally, the model systems will be replicated remotely at USC Lancaster and incorporated into lower division biology courses, thus directly testing the adaptability of the laboratory.
Cooper Power Tools Gear Manufacturing Study
Collaborators: Rocheleau (USC ME)
Graduate Students: Atilola (USC MSME)
Funding: Cooper Power Tools, Lexington, SC
The success of Cooper Power Tools (CPT) relies heavily on the proper design and manufacturing of gearing in the context of tool noise and wear. This research project looks at both the design of the gears and how they are produced. By extensive research, the significant factors that affect the noise and life of the tool are to be determined.
Control of MEMs
Collaborators: Darabi (USC)
Microelectromechanical devices (MEMs) have shown their worthiness in many applications from simple sensors (e.g. automobile acceleration sensors) to full lab on a chip devices. However, the control of these devices remains crude. While the benefits of feedback control on macro sized devices is well documented, the application of these concepts to MEMs are limited. The reasons for this shortfall include the time response necessary to use conventional techniques. There exists an opportunity for research into the theory and design of control systems on the micro scale.
Implentation of a Simulink Based Controller for a PUMA Robot (PUMA 260 Retrofit)
Graduate Students: Guo (USC MSME)
The control of mechanical systems typically requires the use programming microcontrollers. While industrial products exist (e.g. dSpace) that allow design of controllers using MATLAB Simulink, they are typically very expensive. This project outlines a method to retrofit a Unimation PUMA 260 robot for control using MATLAB Simulink with a QNX RTOS utilizing the Mark V Automation retrofit kit. The result is a ready to go system that can be utilized for control system education and research.
Parallel Manipulators
Voglewede Doctoral Dissertation
Parallel manipulators (PMs), a subset of robotic manipulators with closed kinematic chains, offer many advantages over serial manipulators: high stiffness, low inertia, and high precision. However, the workspace of these manipulators are typically small. Additionally, these manipulators contain poses inside their workspace (called singularities) in which they can lose constraint and possibly collapse which further divide the already small workspace. These poses have been rigorously studied, but the design of parallel manipulators has been typically done with questionable mathematical techniques. Work continues on developing frame invariant measures for the design of manipulators. These measures allow for the design of manipulators that have the aforementioned advantages, with a much improved workspace.
